Development of an Experimental Rig to Assess the Effects of Material Texture on Neurological Response
MAI Biomedical Engineering Thesis Project | April 2026
Overview
Research on the brain's response to texture is limited, particularly under controlled experimental conditions. Previous studies relied on active exploration where participants move their hands over surfaces, introducing variability in contact force, speed, and trajectory.
This project developed a passive tactile stimulation rig with a two-axis actuation system that delivers textured stimuli via a roller mechanism with precise control over speed and displacement, enabling repeatable experiments synchronised with EEG recording.
Design
The design process began with exploring different approaches to passive tactile stimulation, evaluating methods such as pressing, sliding, and rolling contact with various hand positions to determine the optimal mechanism for controlled texture delivery.
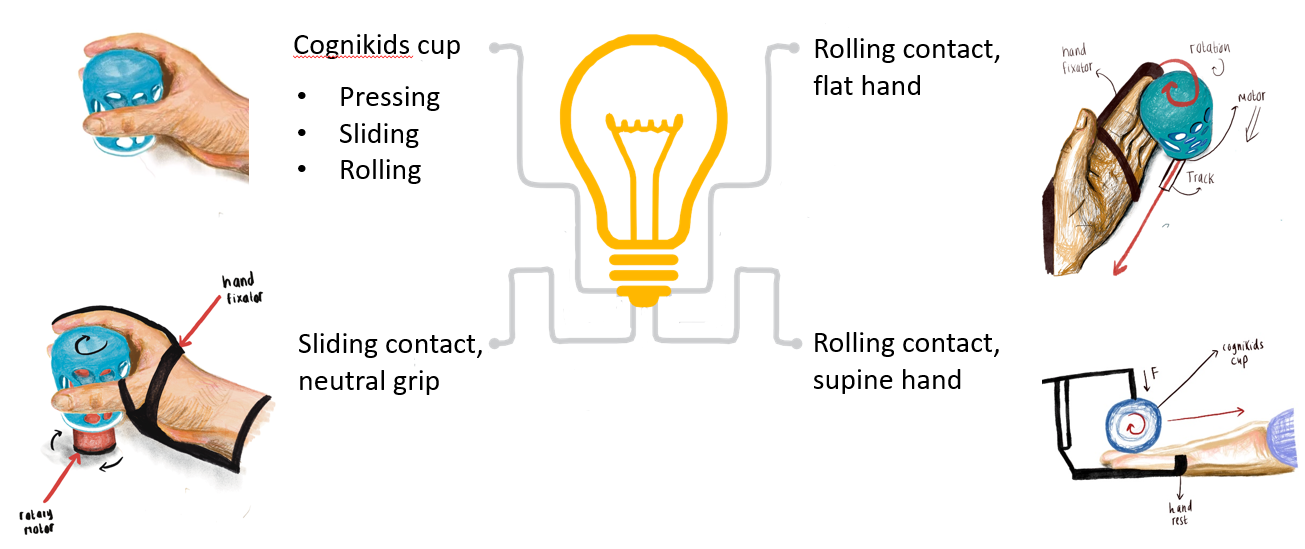
Early concept exploration: evaluating pressing, sliding, and rolling contact methods with different hand orientations
The final system architecture centres on a Teensy 4.1 microcontroller coordinating motor drivers, contact detection via IR break-beam sensors, and TTL output for EEG synchronisation. The modular design allows independent control of horizontal travel and vertical indentation.
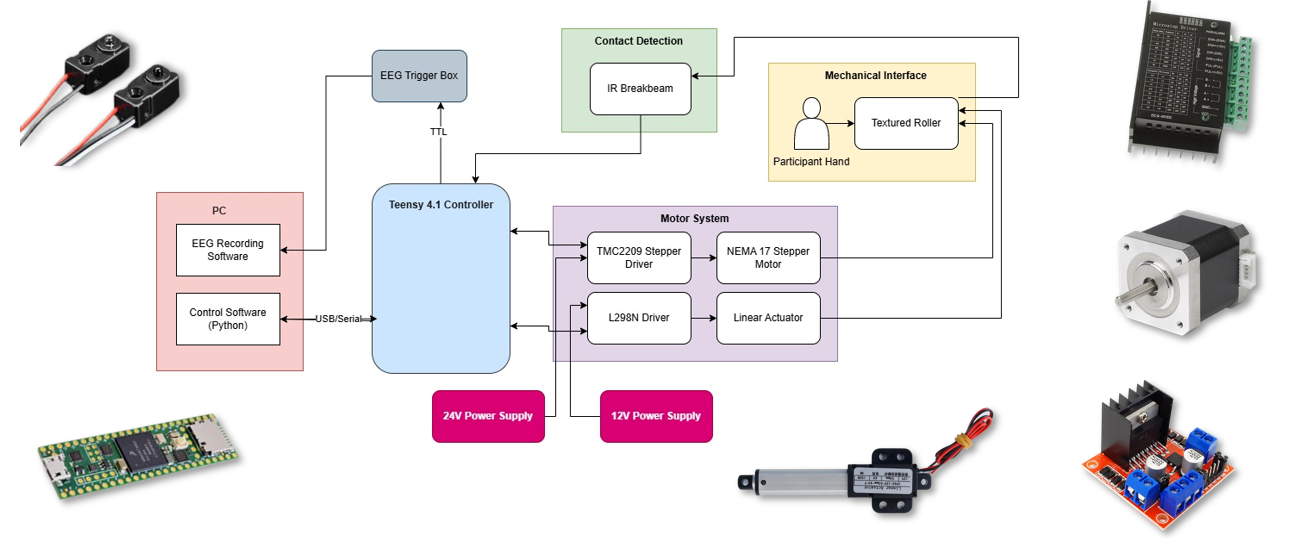
System architecture: Teensy 4.1 microcontroller coordinating motor control, contact detection, and EEG synchronisation
The mechanical design was developed in SOLIDWORKS, featuring a two-axis linear stage built from 2020 aluminium extrusion with 250mm ball screws and linear guide rails. Custom 3D printed PLA components house bearings, motor mounts, and the roller mechanism.
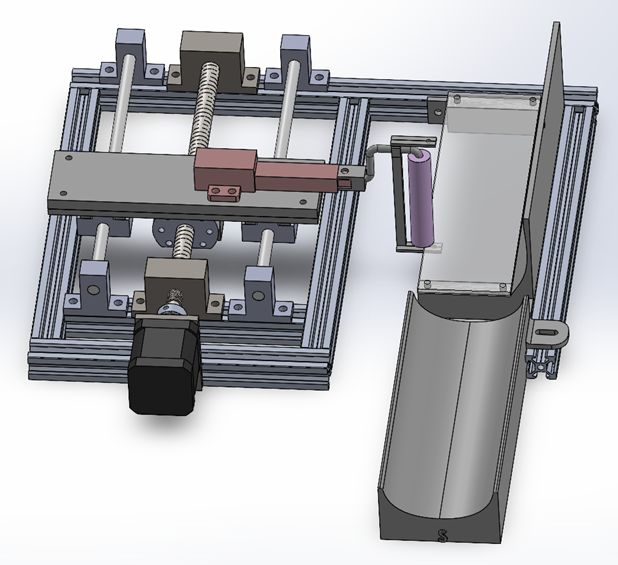
CAD model showing the complete assembly with linear stage, roller mechanism, and hand rest
Build
The physical build combined purchased components with custom 3D printed parts. The frame uses 2020 aluminium extrusion for rigidity, while motor mounts, bearing housings, and the roller assembly were printed in PLA. Electronics are housed in a separate enclosure to reduce electromagnetic interference with EEG equipment.
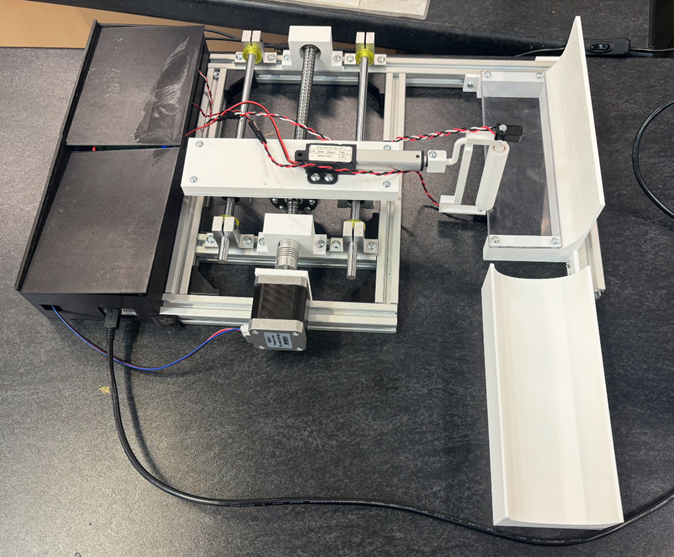
Final assembled system showing stepper motors, linear actuator, and enclosed power supply
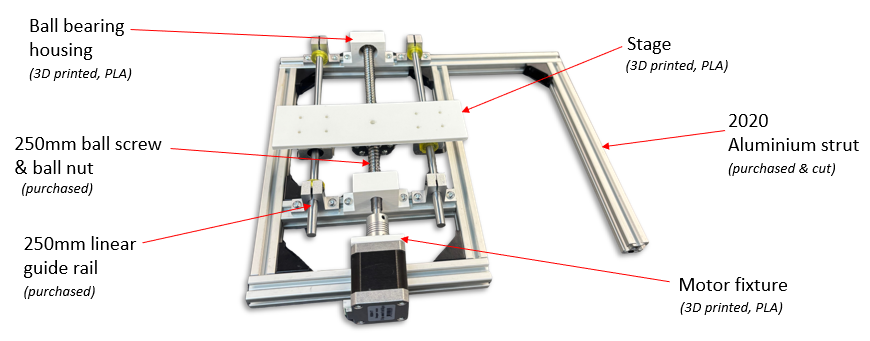
Linear stage breakdown: ball screw assembly, guide rails, and 3D printed motor fixtures
Interchangeable Textures
The roller accepts interchangeable 3D printed cylinders with varying surface patterns. Four texture types were developed for initial testing: solid smooth, small perforations, honeycomb lattice, and large hexagonal cutouts. Each provides a distinct tactile sensation while maintaining consistent contact geometry.
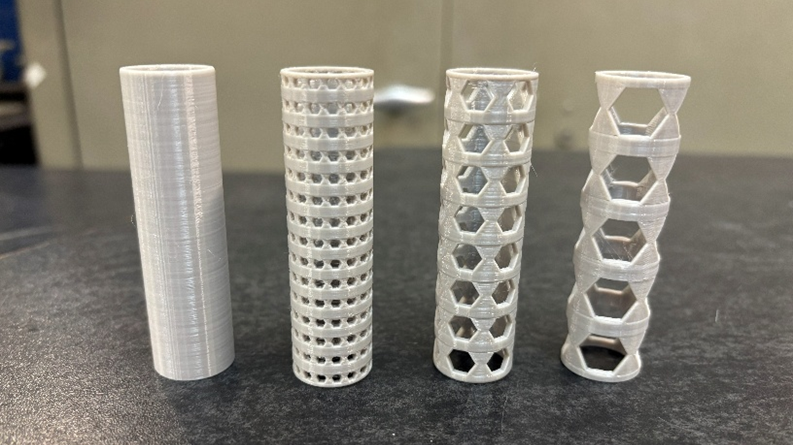
Texture cylinder set: solid, perforated, honeycomb, and hexagonal patterns
Control Software
A custom Python GUI communicates with the Teensy via serial connection, providing controls for connection management, motion parameters, IR sensor calibration, and EEG trigger testing. The interface displays real-time status and logs all test sessions for experimental records.
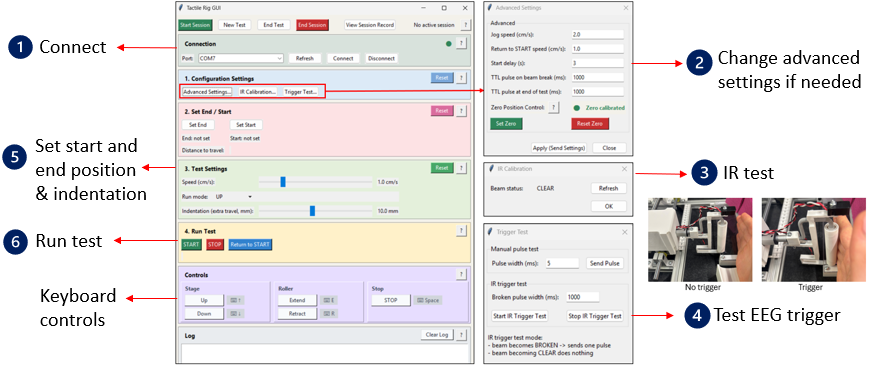
Python GUI showing connection panel, test settings, and calibration windows
Skills Applied
Outcome
Testing validated consistent, repeatable texture application with reliable contact detection and precise EEG trigger synchronisation. The system shows strong potential for neuroscience studies and validating textured products designed to influence sensory and motor development.
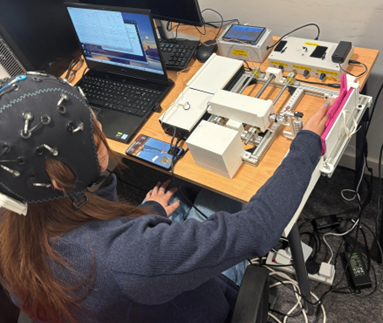
System in use during EEG testing with participant